- Description
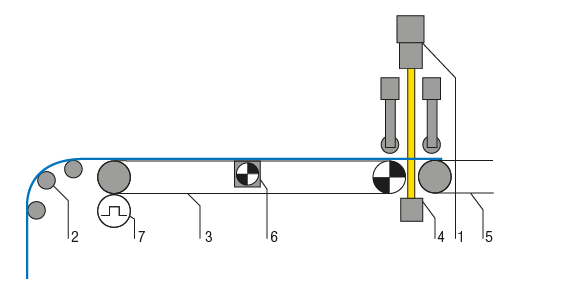
- Plan fonctionnel
Fonctionnement
La bande de ceinture (corde d'acier) est détectée à l'aide de caméras CCD, de capteurs infrarouges ou de capteurs à triangulation laser. Les capteurs palpent l'espace entre deux convoyeurs. Le convoyeur devant la caméra (vu dans le sens du transport) peut être déplacé latéralement, c'est-à-dire à 90° par rapport au sens de transport du matériau, pour réguler le matériau à l'aide d'un actionneur (AG 9). Le convoyeur en aval de la caméra ou le tambour de confection pneumatique fixent le matériau guidé.
Domaine d'utilisation
Le système de guidage de bande de ceinture est utilisé dans la machine de confection de pneumatiques et guide les courroies en acier devant le tambour de confection des pneumatiques.
Application
Dès que la caméra détecte la pointe du matériau, le convoyeur s'arrête et s'aligne latéralement en fonction de la position du matériau. Ensuite, le matériau est guidé pendant la poursuite du transport dans la zone de l'arête de coupe oblique, soit selon l'arête extérieure, soit selon l'arête de coupe elle-même. Dans la zone sans arête de coupe, le mode de guidage passe au "centre du matériau". Le guidage du bord incliné à la fin du matériau se fait alors à nouveau selon un bord extérieur ou selon le bord de coupe. Le guidage selon l'arête de coupe s'effectue généralement pour des matériaux plus larges (par ex. pneus de camion), car dans ce cas, en raison des tensions dans le matériau, les arêtes de coupe ne sont éventuellement plus tout à fait droites et des espaces (mauvaise épissure) pourraient donc apparaître sur le tambour lors du guidage selon l'arête du matériau.
Guidage à ceinture standard
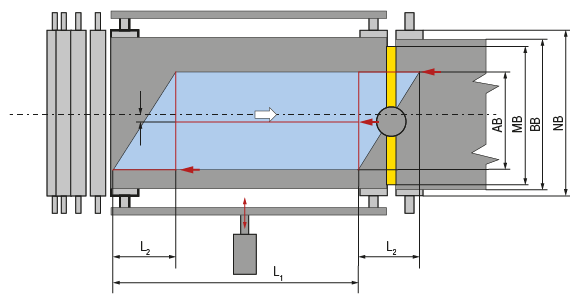
Guidage à ceinture selon le bord de coupe
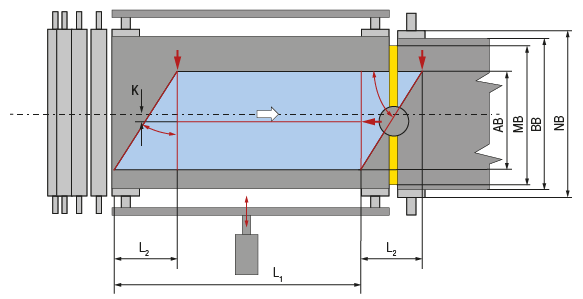
Légende
K = Correction du défilement | AB = Largeur de travail | MB = Étendue de mesure | BB = Largeur de bande | NB = Largeur de bande | α = Arête de coupe d'angle
1 = Caméra CCD à balayage linéaire | 2 = Rouleaux d'entrée | 3 = Tapis transporteur | 4 = Émetteur de lumière | 5 = Fixation tapis transporteur | 6 = Servomoteur | 7 = Codeur incrémentiel | L1 = Longueur de la bande de ceinture | L2 = Longueur arête de coupe






