
- Description
- Plan fonctionnel
Fonctionnement
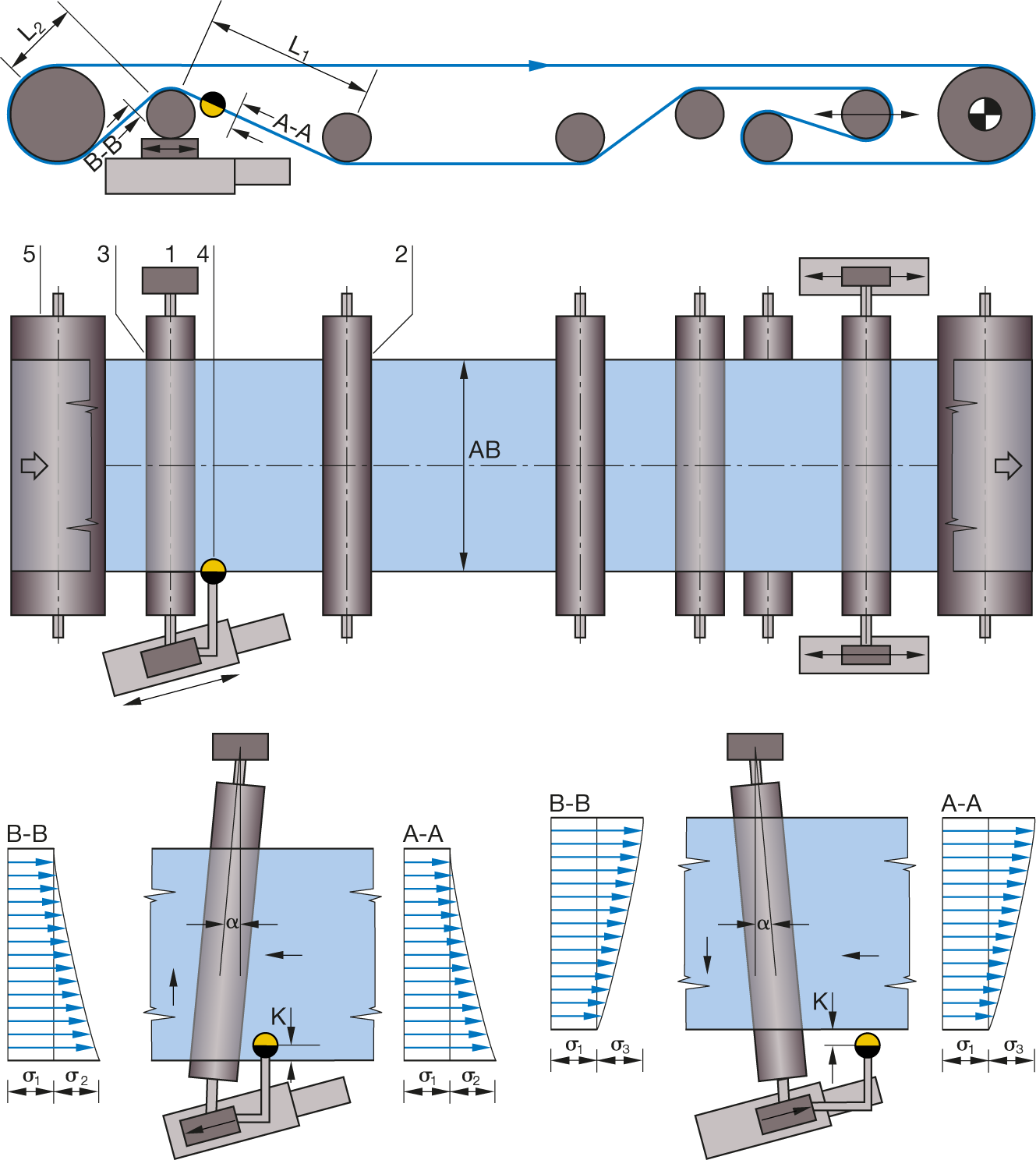
Les rouleaux qui se trouvent en position oblique par rapport à l'orientation du tapis causent un mouvement latéral du tapis. Ce principe de fonctionnement est utilisé par le système à guidage de convoyeur ELBANDER pour le guidage du tapis. Le point de rotation du rouleau à guidage de convoyeur est ici l'un des deux paliers. C'est autour de ce point que le rouleau d’asservissement est positionné de manière oblique en fonction de la nécessité de correction.
Domaine d'utilisation
Les systèmes à guidage de convoyeur sont utilisés avant tout pour la régulation de tapis de transport.
Application
Sur les tapis de transport, il faut monter le rouleau à guidage de convoyeur dans le brin conducteur inférieur, juste avant le rouleau frontal. Le système de guidage doit être placé à un angle de 15° par rapport au sens de défilement du tapis. Le mouvement de régulation doit se faire dans la bissectrice entre la longueur d'entrée et la longueur de sortie. La longueur d'entrée doit ici être d'au moins une largeur de tapis. La longueur de sortie doit par contre être la plus courte possible. Le rouleau d’asservissement doit être enlacé entre 40° et 60°. Pour des vitesses de production >1000 m/mn, l'enlacement doit être réduit à une valeur située entre 10° et 20°. La détection de position s'effectue avec un capteur de bord juste avant le rouleau d’asservissement. Pour éliminer d'éventuelles influences perturbatrices du rouleau tendeur sur le système de régulation de tapis, cette détection se fera uniquement parallèlement à l'axe.
Légende
A = Répartition de la tension de tapis à l'entrée | B = Répartition de la tension de tapis à la sortie | K = Correction du défilement du tapis | K = Correction du défilement du tapis | σ Angle de correction | σ1 = Tension de base du tapis | σ2 = Répartition de la tension avec un déplacement de réglage vers la gauche | σ3 = Répartition de la tension avec un déplacement de réglage vers la droite | 1 = Point de rotation | 2 = Rouleau d'entrée | 3 Rouleau d’asservissement | 4 = Capteur | 5 = Rouleau fixateur | L1 = Longueur d'entrée | L2 = Longueur de sortie | AB = Largeur de travail