- Açıklama
- Fonksiyon çizimi
İşlevi
Ürün hattı hareketi kontrolü için kullanılan yönlendirme silindirleri sistemi ELROLLER, ürün hattı konumunu henüz giriş alanında düzeltir. Sistem, sabit ana çerçeveden ve hareketli bir konumlandırma çerçevesinden oluşur. Üzerinde bir veya iki konumlandırma silindiri bulunan konumlandırma çerçevesi, sanal olarak giriş alanında bulunan dönme noktası çevresinde döner. Bir yönlendirme silindiri, oransal aktüatör olarak adlandırılır ve kuvvet bağlı bağlantı oluşturacak şekilde çalışmalı ve ürün hattı ile konumlandırma silindiri arasında herhangi bir kaymaya izin vermemelidir.
Kullanım alanı
ELROLLER sistemleri, ürün hattı hareketi kontrolünde, proses teknolojisi nedeniyle uzun besleme yolu bulunan uygulamalarda kullanılır.
Uygulama
Mekansal koşullara bağlı olarak ürün hattı hareketi kontrolünde yönlendirme silindirleri, bir (ürün hattı 90°'lık bir dolama açısıyla yönlendirilir) veya iki (daha düşük değerli bir dolama mümkündür) konumlandırma silindiriyle donatılmış olarak kurulabilir. Ürün hattı hareketi kontrolü için ELROLLER sisteminin monte edilebilmesi için: Giriş yolunun ürün hattı genişliğinin iki veya üç katı kadar olması, çıkış yolununsa ürün hattı genişliğinin % 50'siyle % 100'ü arası oranında olması gerekir. Sensörün, çıkış silindirine olabildiğince yakın bir şekilde konumlandırılması gerekir. Bu sayede kısa bir reaksiyon süresi, böylelikle de daha yüksek bir konumlandırma dinamiği elde edilir.
Açıklamalar
Tek konumlandırma silindiri:
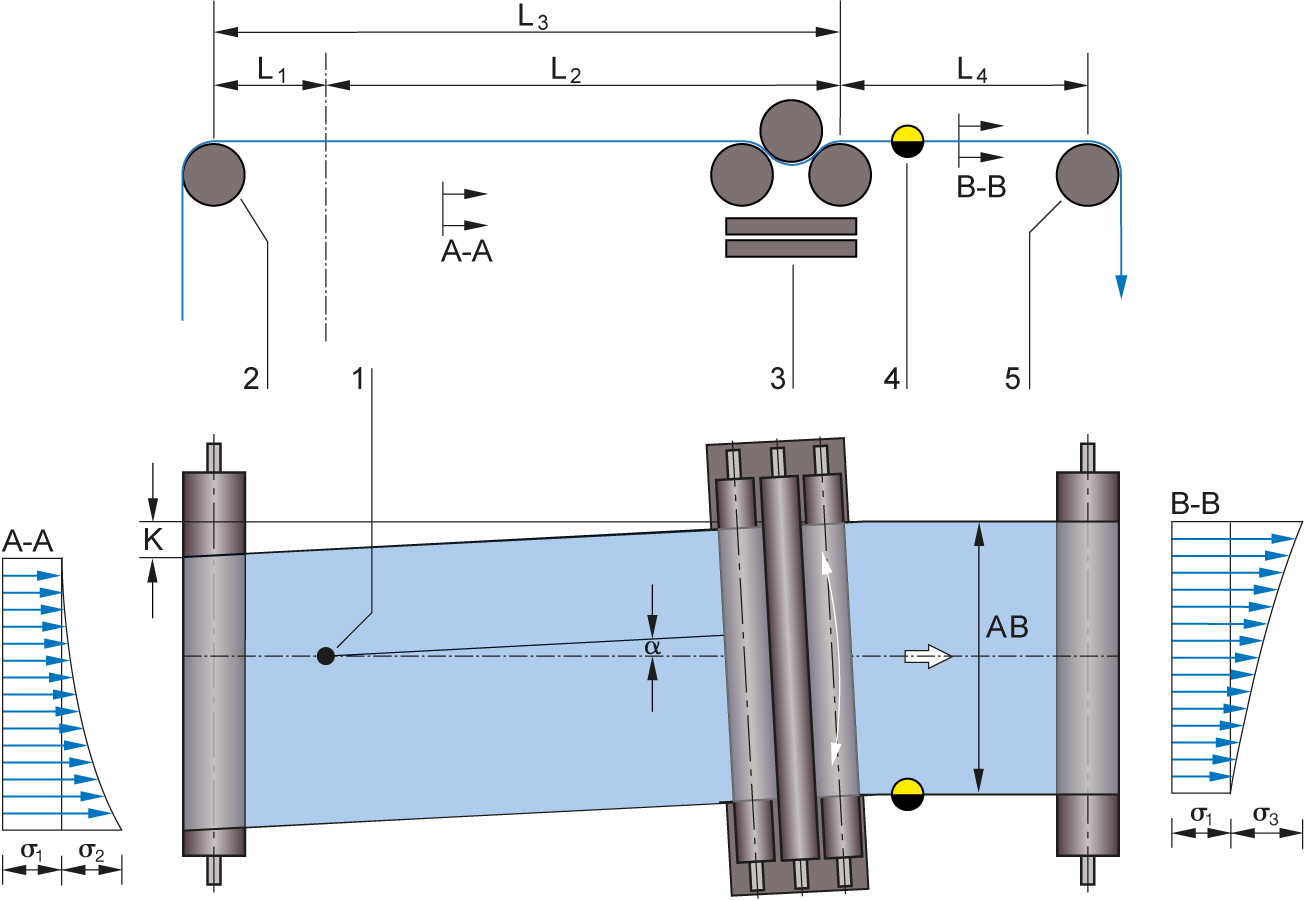
A = Girişteki ürün hattı gerginliği dağılımı | B = Çıkıştaki ürün hattı gerginliği dağılımı | K = Ürün hattı hareketi düzeltmesi | a = Düzeltme açısı | σ1 = Temel ürün hattı gerginliği | σ2 = Girişte silindir çerçevesi dönme hareketinin yol açtığı gerginlik dağılımı | σ3 = Çıkışta silindir çerçevesi dönme hareketinin yol açtığı gerginlik dağılımı | 1 = Dönme noktası | 2 = Giriş silindiri | 3 = Konumlandırma silindiri/silindirleri | 4 = Sensör | 5 = Sabitleme silindiri | L1 = Dönme noktasına kadarki giriş yolu | L2 = Dönme noktası ile yönlendirme silindiri arası giriş yolu | L3 = Giriş yolu | L4 = Çıkış yolu
İki konumlandırma silindiri:
A-A = Girişteki ürün hattı gerginliği dağılımı | B-B = Çıkıştaki ürün hattı gerginliği dağılımı | K = Ürün hattı hareketi düzeltmesi | a = Düzeltme açısı | σ1 = Temel ürün hattı gerginliği | σ2 = Girişte silindir çerçevesi dönme hareketinin yol açtığı gerginlik dağılımı | σ3 = Çıkışta silindir çerçevesi dönme hareketinin yol açtığı gerginlik dağılımı | 1 = Dönme noktası | 2 = Giriş silindiri | 3 = Konumlandırma silindiri/silindirleri | 4 = Sensör | 5 = Sabitleme silindiri | L1 = Dönme noktasına kadarki giriş yolu | L2 = Dönme noktası ile yönlendirme silindiri arası giriş yolu | L3 = Giriş yolu | L4 = Çıkış yolu







