E+L ハイライト
ニュースレター
Erhardt+Leimerニュースレターに登録して、製品やイノベーションなどに関するニュースを定期的に受け取りましょう。
Automation & Vision Systems
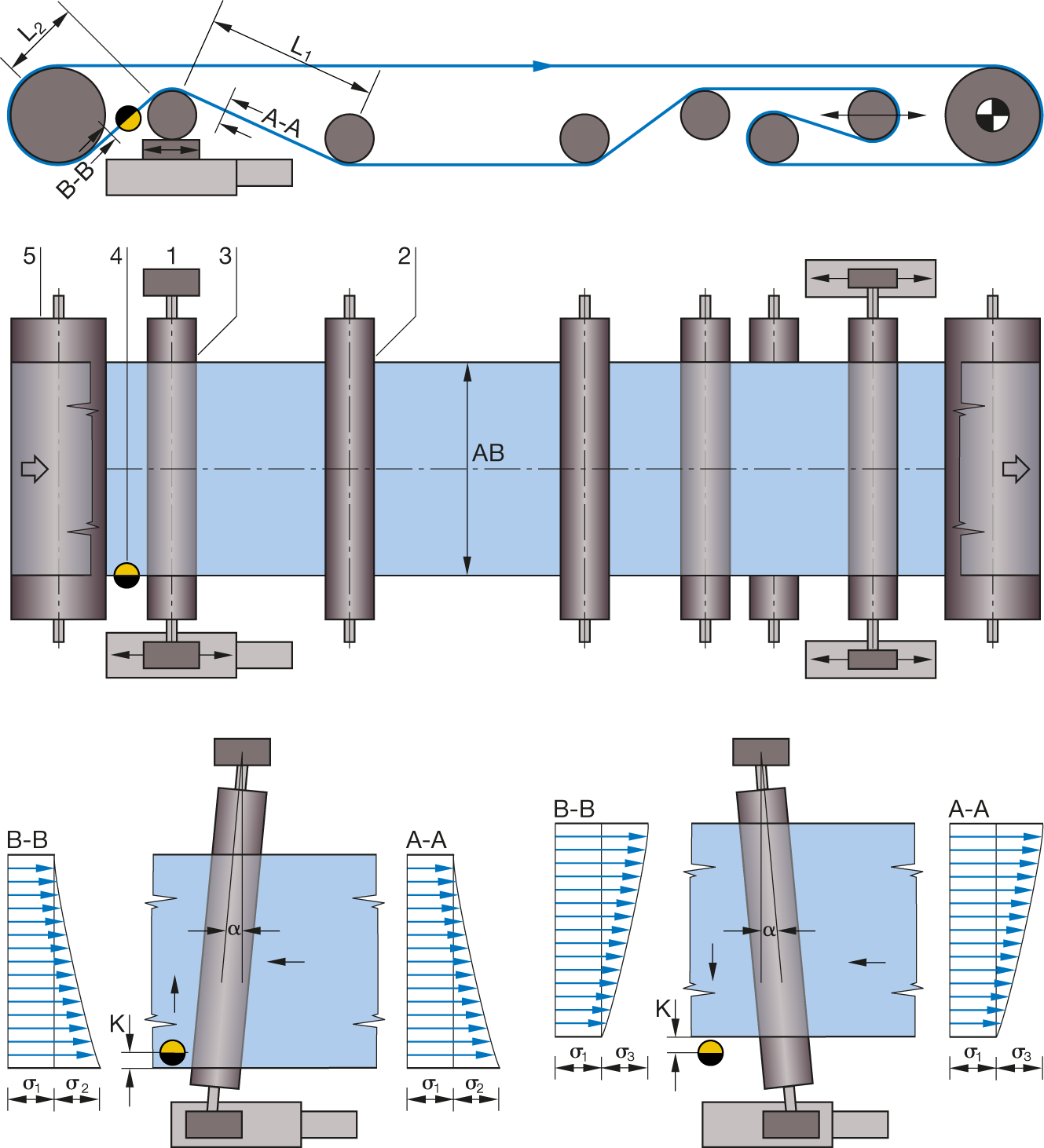
記号説明
A = インフィード側のベルト張力分布 | B = アウトフィード側のベルト張力分布 | K = ウェブ走行の補正
σ1 = ベルト基本張力 | σ2 = 左方向の変位動作時の張力分布 | σ3 = 右方向の変位動作時の張力分布
1 = 旋回点 | 2 = 入口ローラー | 3 = ガイドローラー | 4 = センサ | 5 = 固定ローラー | L1 = インフィード長さ | L2 = アウトフィード長さ | AB = 作業幅
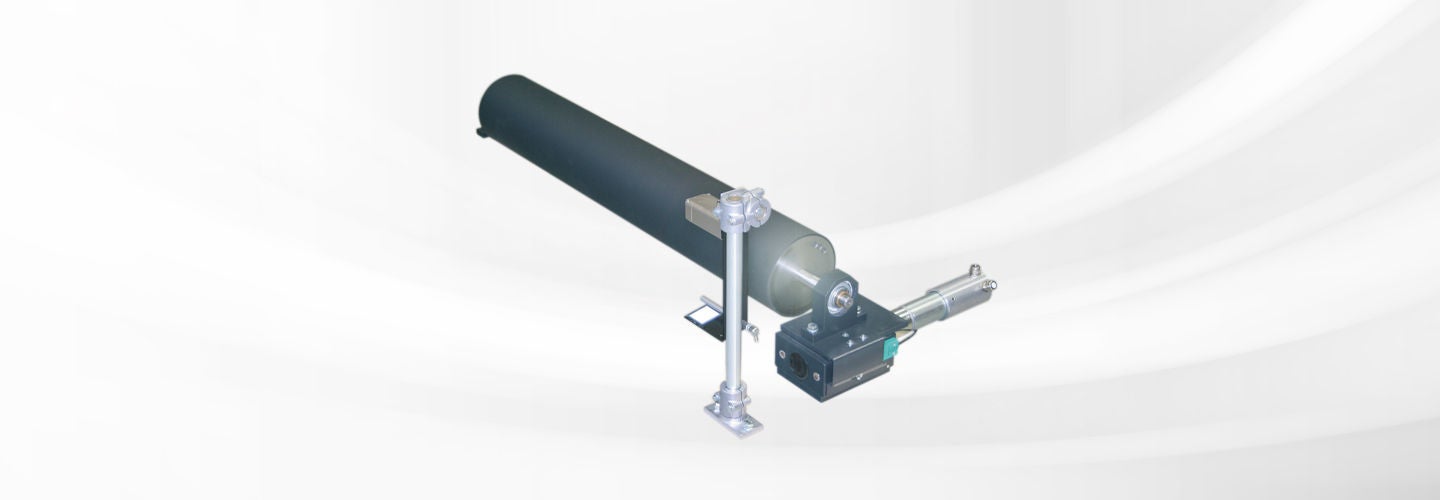
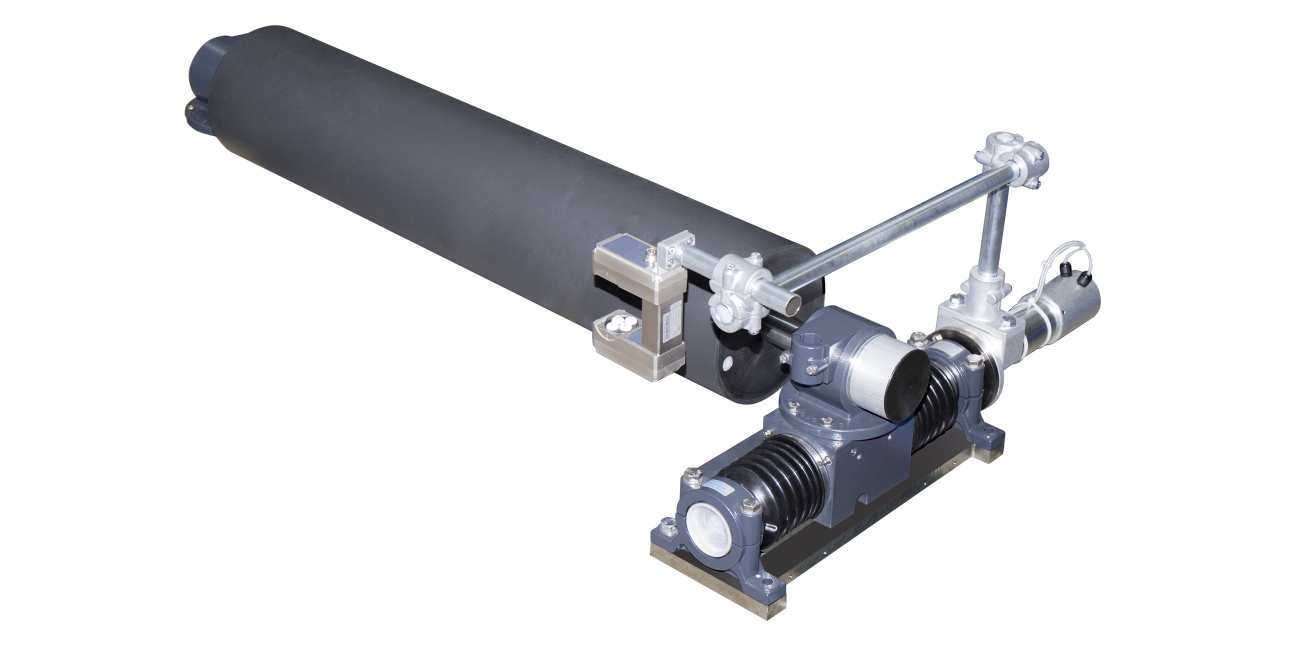
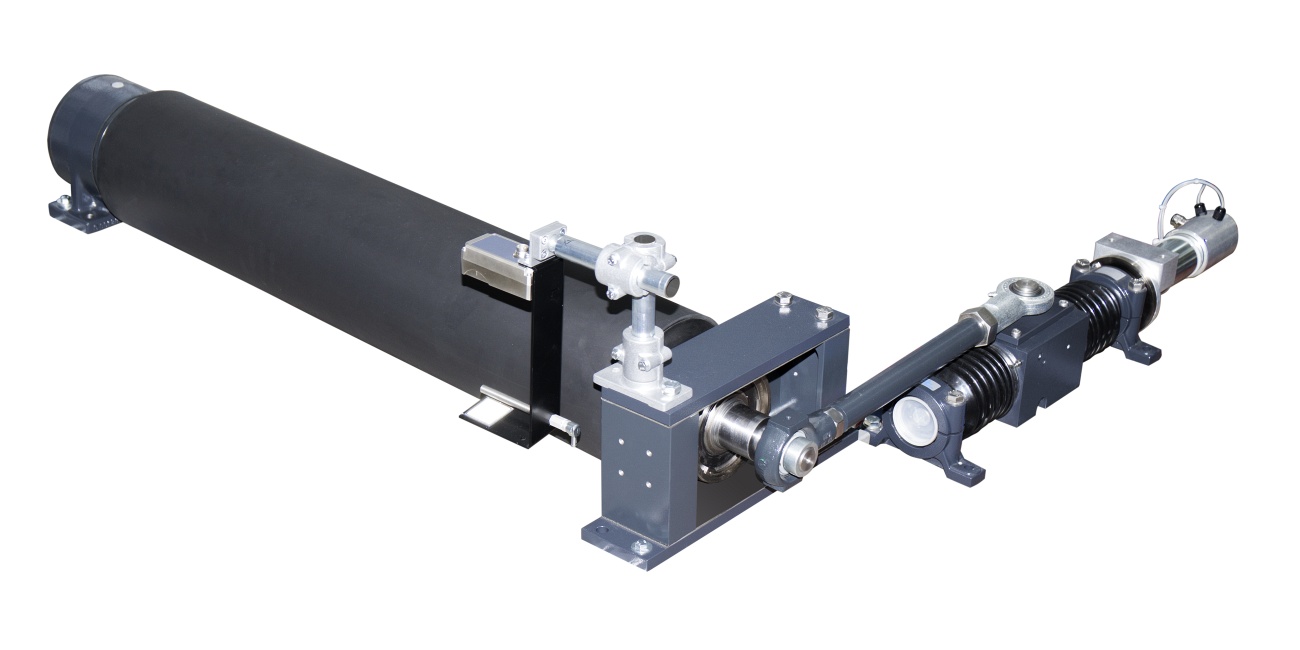
ピボットローラーシステム ELBANDER VGS14
リニアガイド、自動ロック型台形スピンドル、トルクサポート付きアクチュエータにより、非接触式エッジ検出と精密補正を行うコンパクトなピボットローラーシステム
ピボッティングローラシステム ELBANDER VGS18
非接触式エッジ検出を行うコンパクトなピボットローラーシステム
ピボッティングローラシステム ELBANDER VGS24
リニアガイド、自動ロック型台形スピンドル、トルクサポート付きアクチュエータにより、精密補正を行うコンパクトなピボットローラーシステム
ピボッティングローラシステム ELBANDER VGS36
非接触式エッジ検出と、大きな荷重を吸収できるようにステップローラーの中に個別に入れられた位置決めローラーを備えたコンパクトなピボットローラーシステム
センサおよびカメラ
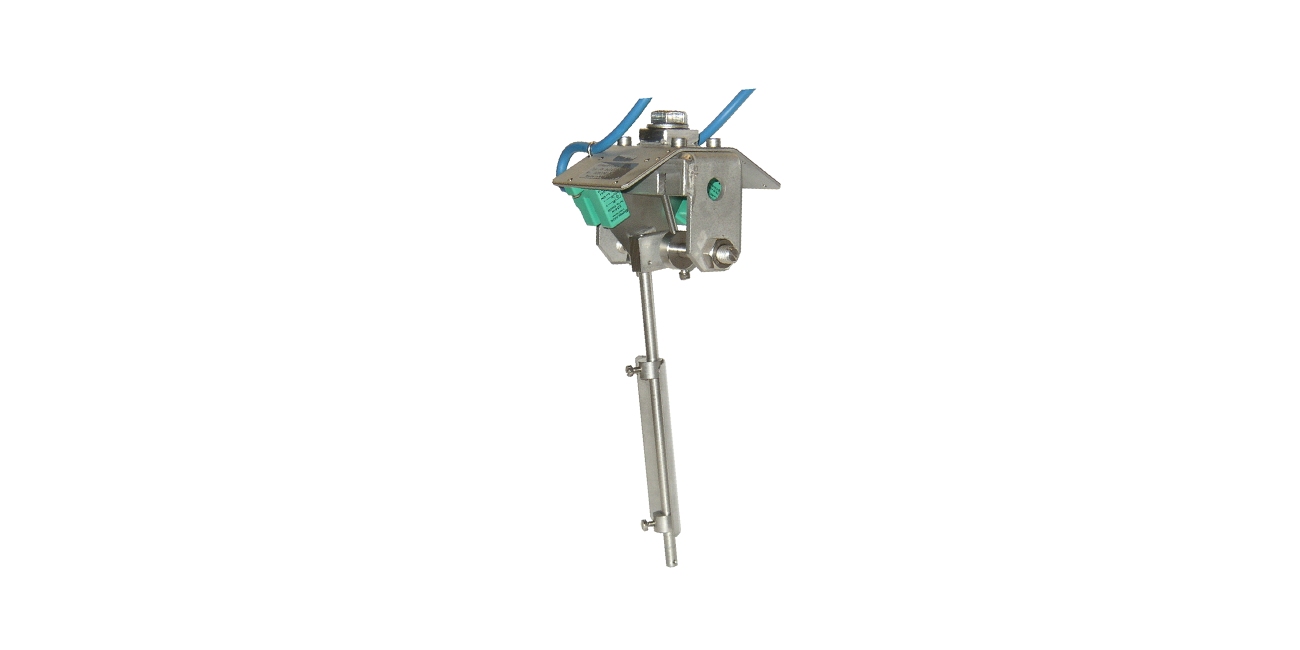
電気機械式エッジセンサ FM 31
コンベアベルトの機械式エッジ検出用アナログ信号出力付き電気機械式エッジセンサ
電気機械式エッジセンサ FM 04
ウェット領域におけるウェブの接触式スキャン用3位置制御用電気機械式エッジセンサ
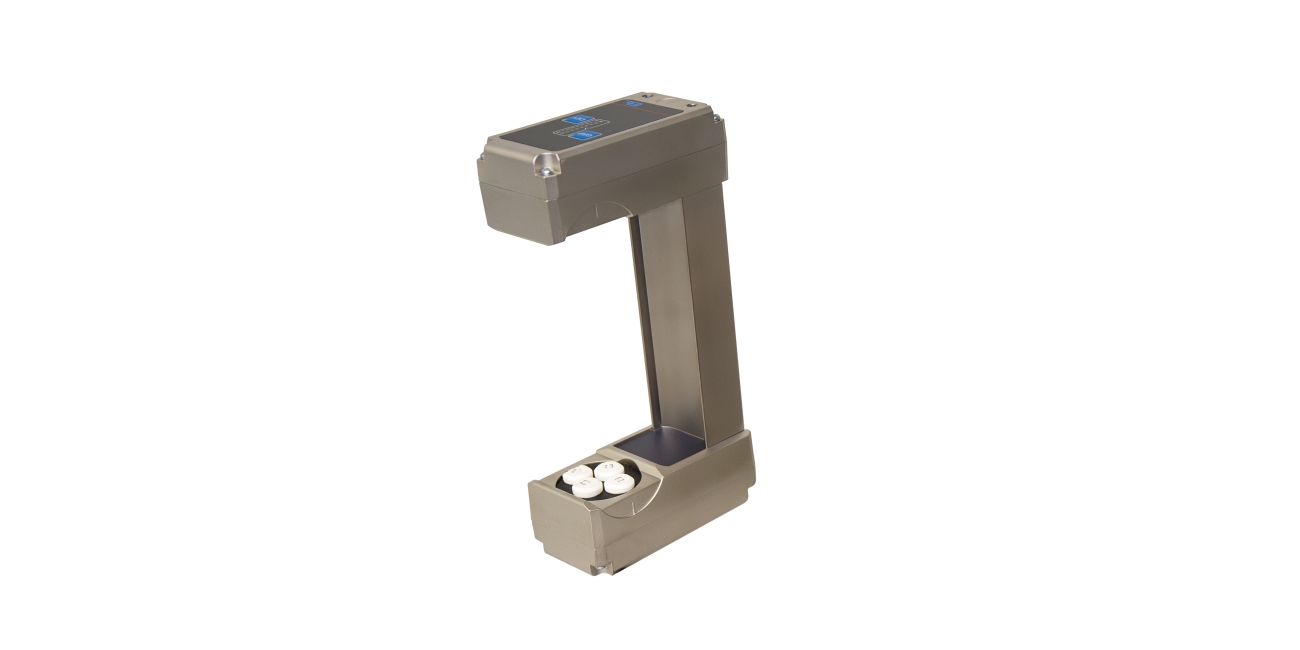
超音波エッジセンサ PoE FX 42
デジタル検出表示付き超音波エッジセンサ、±3 mm の視野および30、60、124 mmのフォーク幅
超音波エッジセンサ PoE FX 52
デジタル検出表示付き超音波エッジセンサ、±10 mm の可視領域および30、60、124 mmのフォーク幅
制御・操作ユニット
操作 DO 40
ウェブガイドシステムの直感的操作ガイダンス、視覚化、操作が可能な、マンマシンインターフェース
File size exceeds the maximum limit of: